
一般大型电动葫芦 (包括行车)均具有前迸、后退、左行、右行、上升和下降6种控制方式,通过各种复杂的联锁进行控制。其缺点是人必须靠近操作,安全性较差。本例介绍的电动葫芦控制电路,采用红外遥控方式,遥控距离 (或高度)为8m以上,使用安全方便,可满足危险场所对吊装装置的特殊要求。
电路工作原理
该遥控电动葫芦控制电路由红外发射电路和红外接收控制电路两部分组成。
红外发射电路由红外发射编码集成电路ic1和外围元器件组成,如图8-113所示。控制按钮sl-s4、二极管vdl-vd3、电容器c3-c8和ic1的4-13脚内电路组成键控输人电路;电容器cl与c2、石英晶振bc和icl的2、3脚内电路组成振荡器电路;电阻器rl-r4、晶体管vl与v2、红外发光二极管vll-vl3和icl的15脚内电路组成红外驱动电路。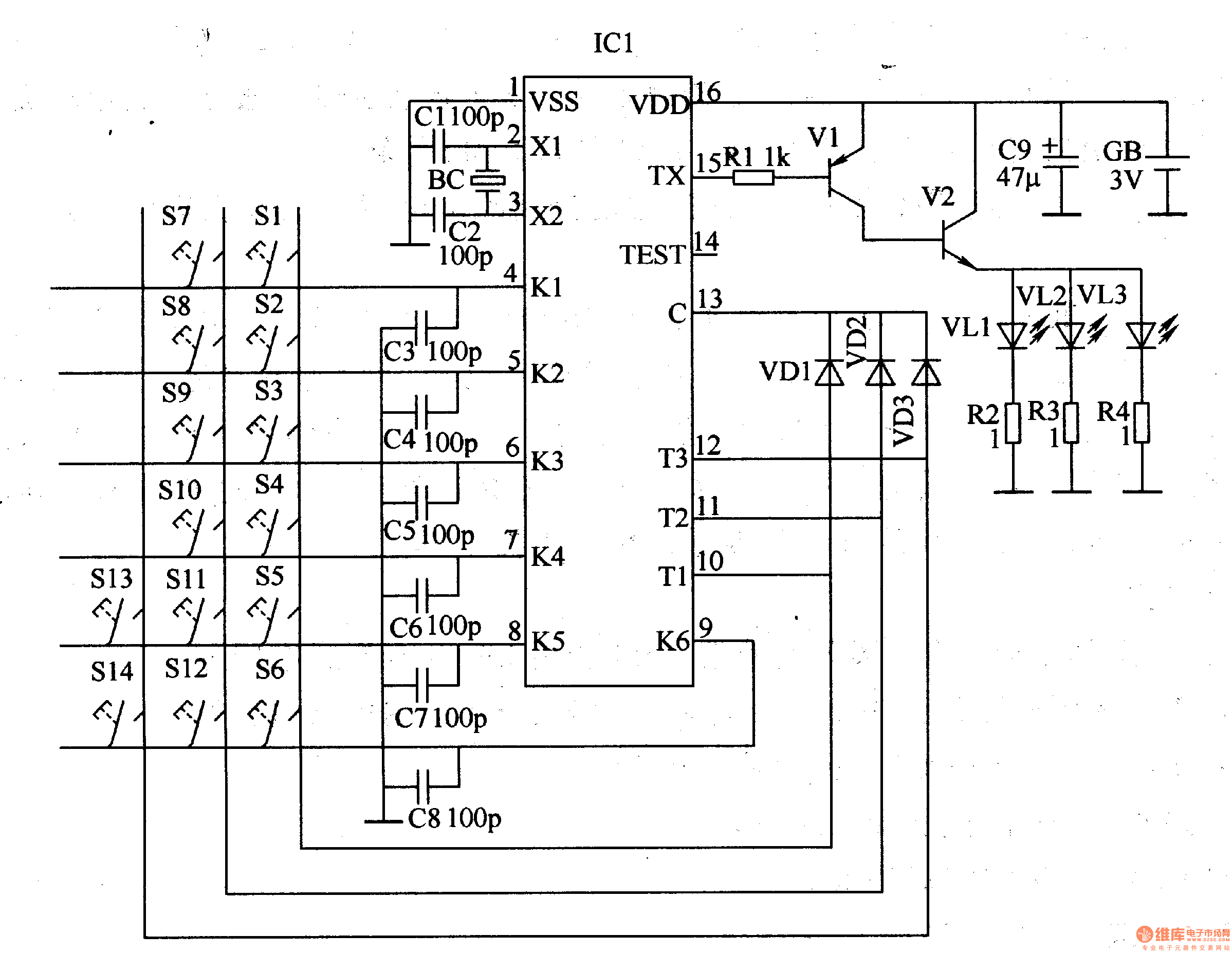
红外接收控制电路由红外接收放大电路、解码电路、触发器控制电路和控制执行电路组成,如图8-114所示。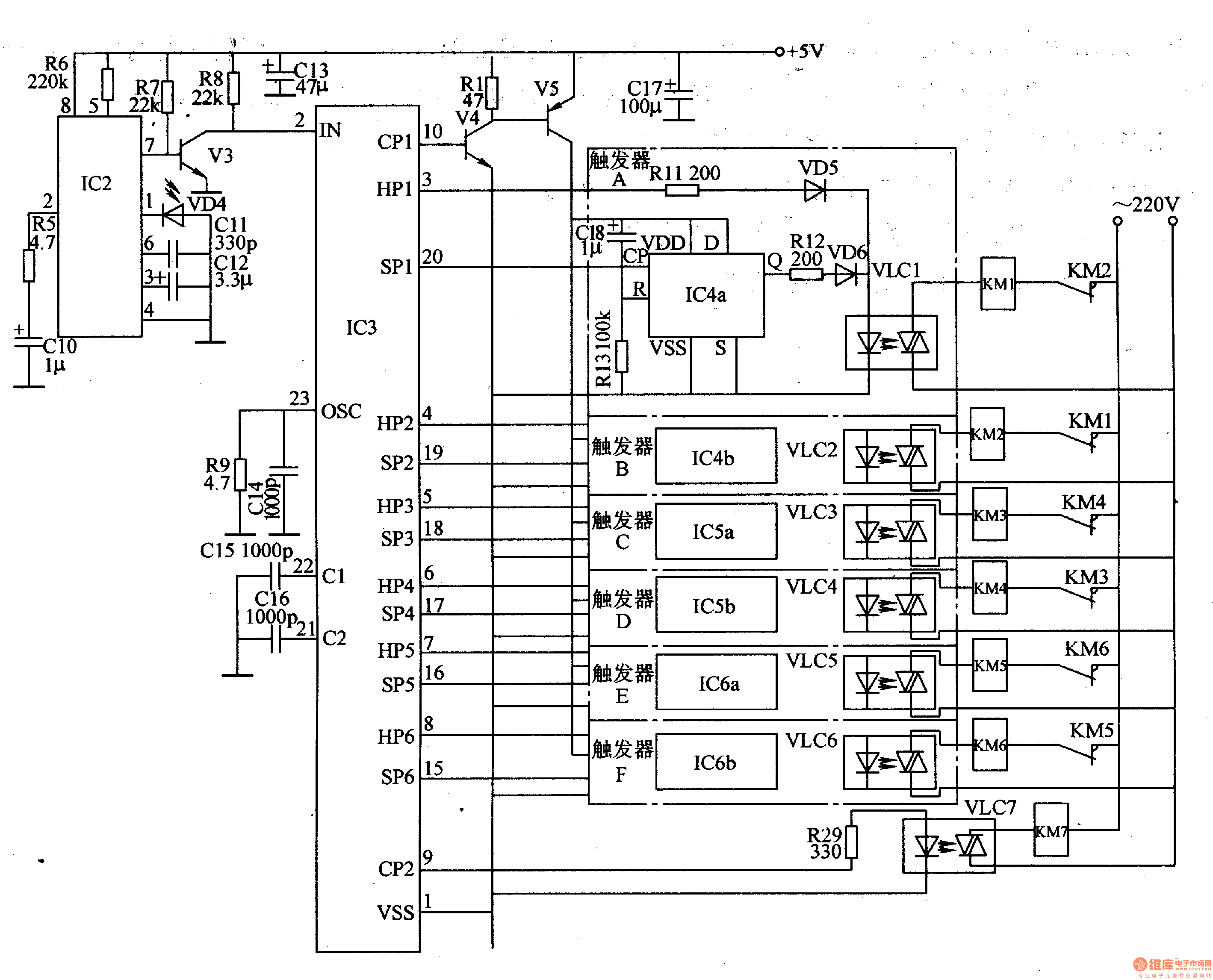
红外接收放大电路由电阻器r5-r8、电容器clo-c13、红外信号处理集成电路ic2、红外接收二极管vd4和晶体管v3组成。
解码电路由ic3、电容器c14-c17、电阻器r9与rlo和晶体管v4、v5组成。
触发控制电路由双d触发器集成电路lc4-1c6、电阻器ril-r28、电容器c18-c23、二极管vd5-vdl6和光鹅合器vlci-vlc6内部的发光二极管组成。限于篇幅,电路中cl9-c23、r14-r28和vd7-vdl6末画出。
控制执行电路由光耙合器vlcl-vlc7、交流接触器kml-km7和电阻器r2g组成。
按动一下s1-s14中某按钮时,lc1内部电路将该按钮产生的遥控指令信号进行编码后调制为38khz脉冲信号,该脉冲信号经vl和v2放大后,驱动vll-vl3发射出红外光。
vd4接收到vll-vl3发射的红外光信号,并将其转换成电脉冲信号。此电脉冲信号经ic2解调放大处理及v3反相放大后加至ic3的2脚,经ic3比较及解码处理后输出控制电平,使相应的触发器翻转,通过相应的交流接触器来控制电动葫芦,完成相应的动作。
s1-s6用作点动控制,s7-s12用于连续动作控制,s13为点动/连续动作方式选择控制,s14为电动机总电源开关控制。
按一下sl时,ic2的3脚输出单脉冲控制信号,使vlcl内部的发光二极管间歇点亮,光控晶闸管间歇导通,km2间歇通电吸合,电动葫芦向前点动运行。分别按一下s2、s3、引、s5和s6时,ic2的4脚、5脚、6脚、7脚和8脚将分别输出单脉冲控制信号,分别通过vlc2-vlc6使km2-km6间歇工作,控制电动葫芦分别完成向后、向左、向右、上升和下降的点动运行。
当按动一下按钮s7时,ic3的20脚将输出连续控制脉冲信号,通过触发器a(由ic4a和外围元器件组成)使vlcl内部的发光二极管点亮,光控晶呵管导通,kml通电吸合,控制电动葫芦连续向前运行。分别按动s8、s9、s10、s11和s12时,lc3的19脚、18脚、17脚、16脚和15脚将分别输出控制信号,分别通过触发器b至触发器f使vlc2、vlc3、vlc4、vlc5和vlc6导通工作,km2-km6分别通电吸合,控制电动葫芦分别完成向后、向左、向右、上升和下降的连续运行。
按动一下s13,1c3的10脚输出低电平,使v4和v5导通,ic4-1c6通电工作,此时电路可进行连续运行控制;再按一下s13,1c3的10脚输出高电平,使v4和v5截止,ic4-ic6停止工作,此时电路只能t行点动运行控制。
按动一下s14,1c3的9脚输出高电平,使vlc7内部的发光二极管点亮,光控晶闸管导通,km7通电吸合,电动葫芦驱动电动机总电源被接通,可进行各种控制操作;再按一下s14时,lc3的9脚输出低电平,使vlc7内部的发光二极管熄灭,光控晶闸管截止,km7释放,电动机的总电源被切断。
元器件选择
rl-r9均选用1/4w的金属膜电阻器。
cl-c8、cll、c14-c16均选用高频瓷介电容器;c9、clo、cl2、ci3和cl7均选用耐压值为lov的铝电解电容器。
vdl-vd3和vd5-vd6均选用1n4148型硅开关二极管;vd4选用ph302型红外发光二极管。
vll-vl3均选用se303a型红外光敏二极管。
vl和v5选用s8550或3cg8550型硅pnp晶体管;v2-v4选用s8050或3dg8050型硅npn晶体管。
icl选用bl9148型红外编码集成电路;lc2选用cx2o106a型红外接收集成电路;ic3选用bl9150型红外解码集成电路;ic4-1c6均选用cd4013型双d触发器集成电路。
vlcl-vlc7均选用taco18型光鹅合器。
kml-km7选用线圈电压为220v的交流接触器。
s1-s14选用微型轻触开关或导电橡胶按键。
bc选用455khz的石英晶体振荡器。